数理工学センターコラム 「高速道路のジャンクションのカーブ形状」

高速道路を運転しているドライバーにとって、カーブを曲がるときに急ハンドルとなる道路形状は事故につながり大変危険です。そのため、高速道路のインターチェンジやジャンクションなどのように、ある程度速いスピードを保ったまま曲がる場所では、なるべくスムーズなハンドル操作でカーブを曲がることができるように設計されています。ドライバーにとってスムーズなハンドル操作とは、ある瞬間にハンドルを急に回すのではなく、少しずつ同じ速度でハンドルを回していくことです。
例えば、写真のジャンクションにおいて左下から来て右下に向かいたい場合。ぐるっと左に曲がるカーブを走らなければなりません。このとき、直線と直線を円でつないだ形でカーブを設計すると、直線を走っているときは、ハンドルはまっすぐですが、カーブを走っているときは、ハンドルは回っていますので、直線からカーブに入った瞬間に一気にハンドルを回すこととなり、急ハンドルとなってしまいます。
では、どのような道路形状であれば、スムーズなハンドル操作を実現できるのでしょうか?
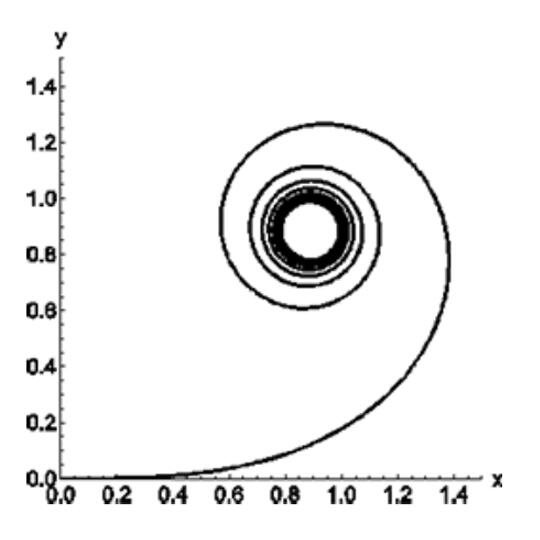
実はクロソイド曲線(図1)と呼ばれる曲線の形を使うと実現できるのです!このクロソイド曲線はアウトバーンと呼ばれるドイツの高速道路で初めて採用され、道路の他にも垂直に一回転するジェットコースターのループの形状にも利用されています。
数学のどの領域の話か
スムーズなハンドル操作を実現する道路の設計という点から考えると、これは、 交通工学という分野の道路計画における道路の幾何構造設計で登場する話題です。
一方、曲線という図形の形状に焦点をあてると、これは、 幾何学という図形の性質を研究する数学の一つの分野で登場し、曲線の曲がり具合を曲率という量で表現することができます。
さらに、図形を表現した数式を解析するためには、 微分・積分あるいは、 解析学といった分野の知識を利用して、計算を進めていきます。
写真に使われている数式
クロソイド曲線とは、パラメータ
を用いて表される曲線
のことで、
はそれぞれ次のように表されます。
…⑴
解説
曲線の曲がり具合を表現する量として、曲率
(カッパと読む)というものを使って考えます。
曲率
は曲線の曲がり具合を円弧として近似し、そのときの円の半径を
とすると、半径の逆数、つまり、
として定義されます。
この定義から、曲率が大きいほど急カーブ、小さいほど緩いカーブを意味していることがわかります。このとき、パラメータ表示された曲線の曲率は
で与えられることが知られています。
そこで、(1)で示したパラメータ表示されているクロソイド曲線の曲率を求めると、
となることから、クロソイド曲線は、曲率が曲線上の移動距離(位置)に比例して増大する曲線となっていることがわかります(図2のグラフ)。
つまり、道路を走っていくにつれ徐々にカーブがきつくなる曲線ということです。
ただ、クロソイド曲線を使うことで、曲率が直線から円弧に変化する間を連続的につなぐことができ、ドライバーにとって急ハンドルにならないようなカーブの設計ができるのです。
冒頭で述べた二つの直線道路を円で結んだ場合では、図3のグラフのように、曲率が不連続になってしまい、この場所で急ハンドルをしなければならない、ということもわかります。

図2:クロソイド曲線でつないだカーブ形状
オレンジ色部がクロソイド曲線で、青色部が円弧を表す。クロソイド曲線は となるため、グラフのオレンジ色部が直線となる。直線から円弧に変化する間の曲率を連続的につなぐことができるので急ハンドルにはならない。

図3:円弧でつないだカーブ形状
青色部が円弧を表す。グラフを見てわかるように、直線部も円弧も曲率が一定であるため、直線から円弧に突入すると、そこで曲率が不連続的に変わり、急ハンドルとなってしまう。
参考文献
- 道路の人間工学,伊吹山太郎・伊吹山四郎著,技術書院,(1965).
- http://www.kozo.co.jp/dracad/member/doc.php?p2=82
- http://www.math.sci.hiroshima-u.ac.jp/~tamaru/files/tamaru_koukai.pdf
著者
1980年広島県生まれ。座右の銘は「日々是渋滞」。
友枝 明保
小学生のころから計算が得意で、計算ばっかりしていました。歴史や倫理は嫌いだけど、データが載っている地理は好き、というくらいの数字好き。それが功を奏してか大学では数学科へ進学し、なんとそこで数学が好きじゃなくなる…数学と言っても、計算をして値を求めて次のステップで使う、ということが楽しかったので、数学の理論が美しいといったことには興味がありませんでした。今は、渋滞や錯覚といった面白い現象に対して、渋滞をなくす、錯覚を自由に制御するための方法を、数学を使って探しています。
※この講座の著作権は著者にあります。無断引用や転載等はお断りいたします。